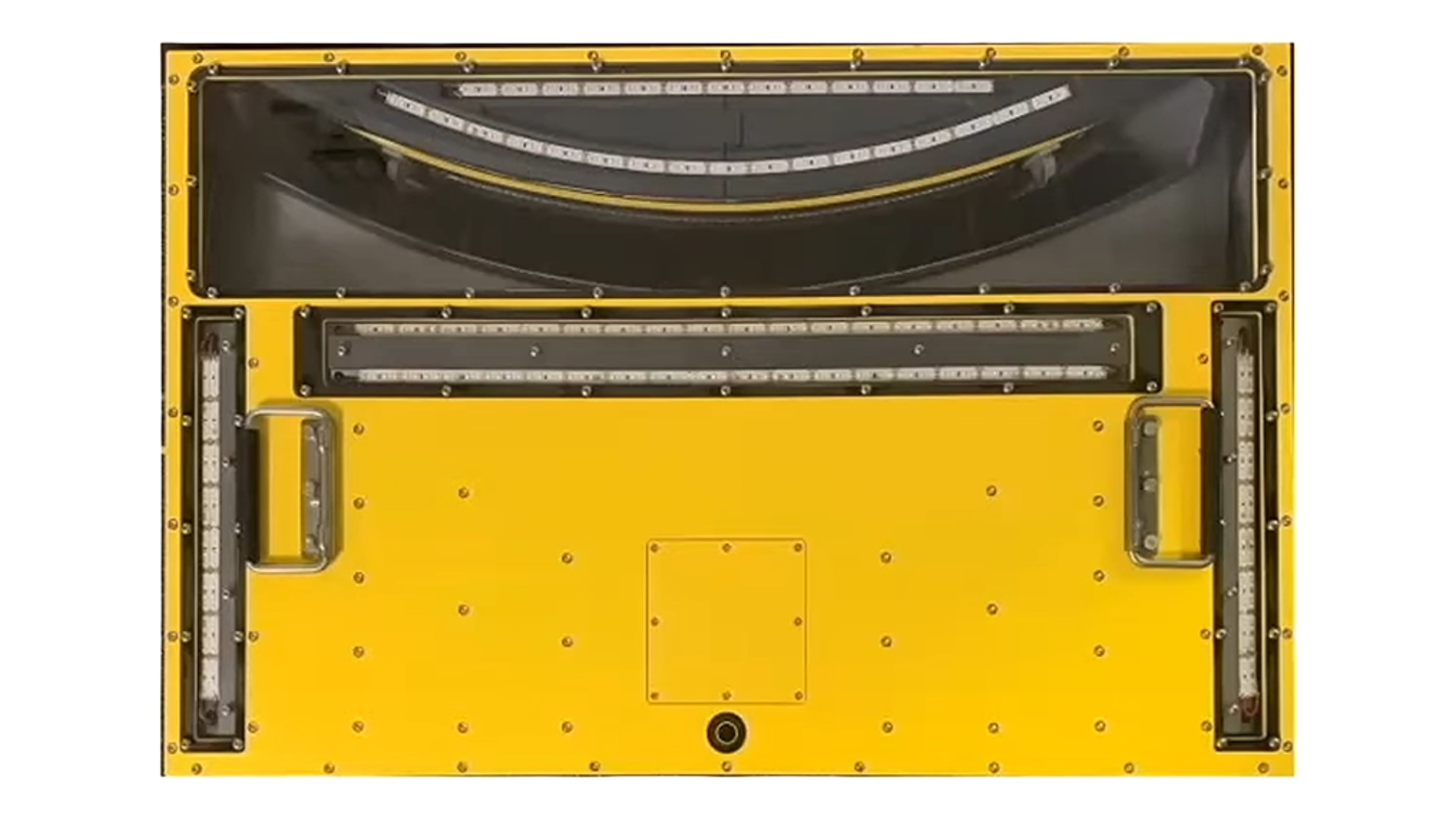
C-IVISS
is a compact, portable car scanner designed to enhance security at high-risk locations.
Strategically placed on the road surface, it captures clear, high-resolution images of a
vehicle's underside as it passes over—helping security personnel detect hidden illegal or
dangerous items like contraband, explosives, or weapons.
Engineered for fast deployment and ease of use, C-IVISS is ideal for critical environments such as military zones, border checkpoints, government facilities, and critical infrastructure. It combines portability with advanced imaging to offer a reliable and non-intrusive solution for vehicle screening, ensuring that safety is never compromised.

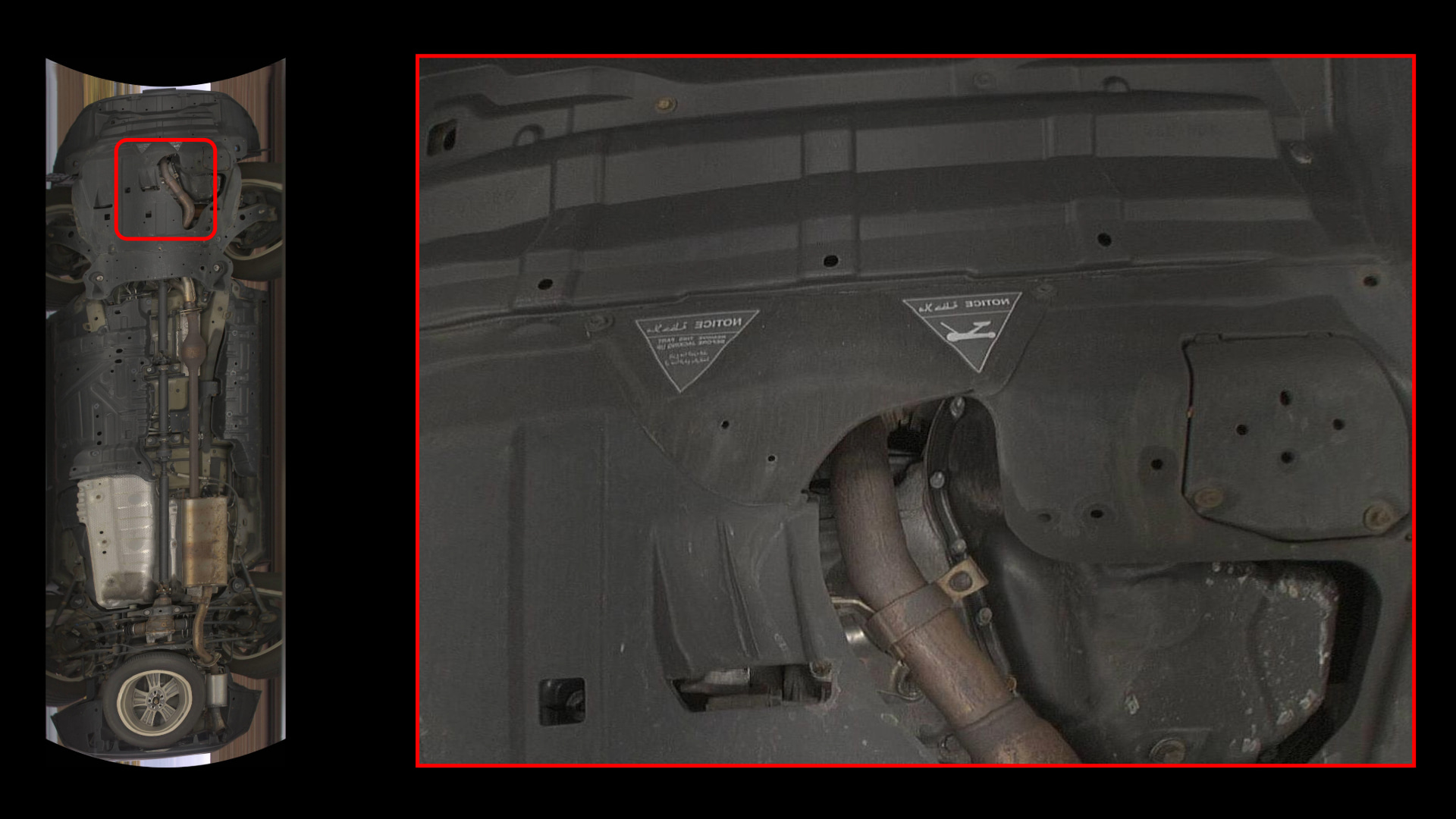
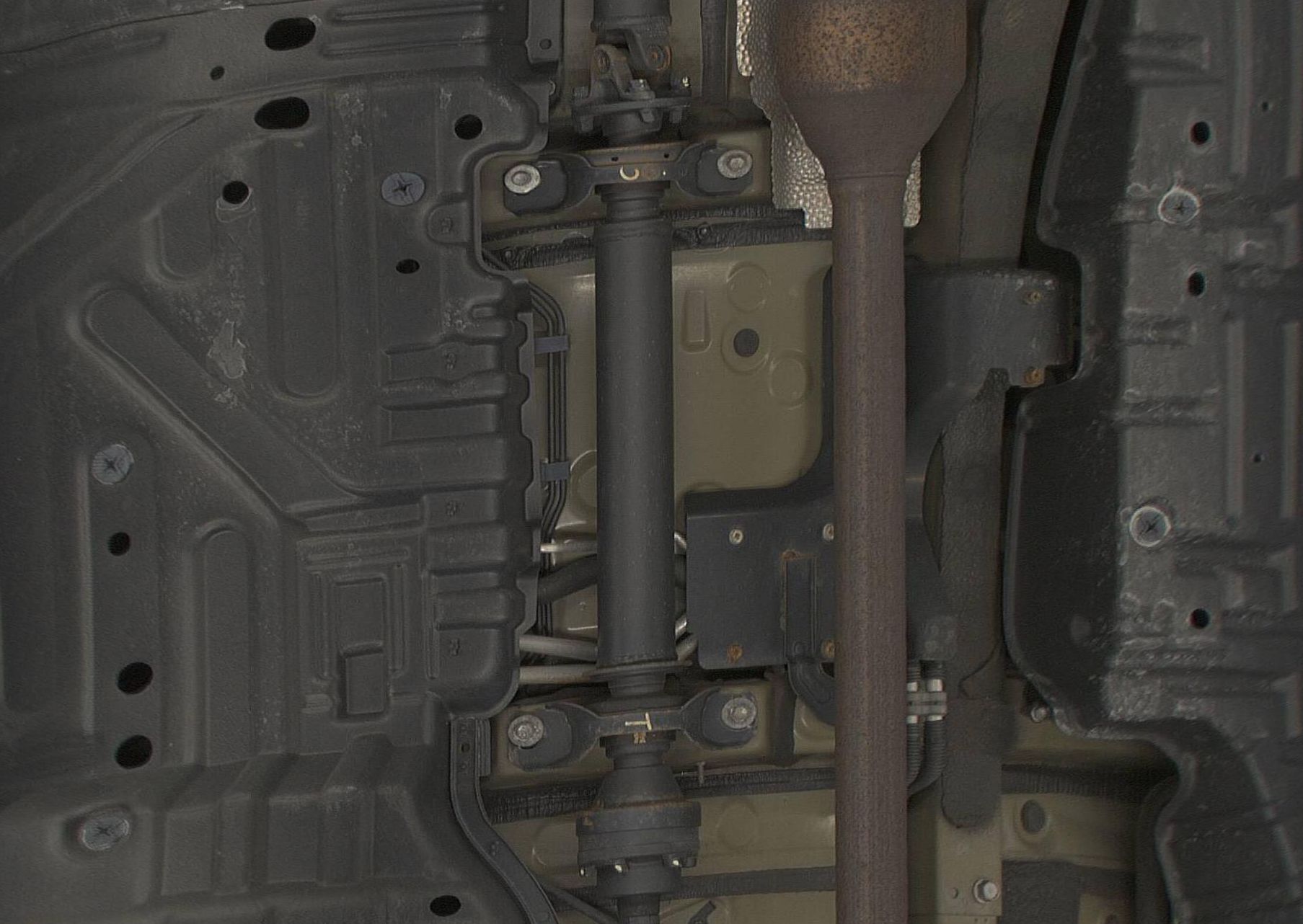
Download the full resolution stitched image seen below. You can zoom in to see every minute detail. You can even read the text on the stickers!
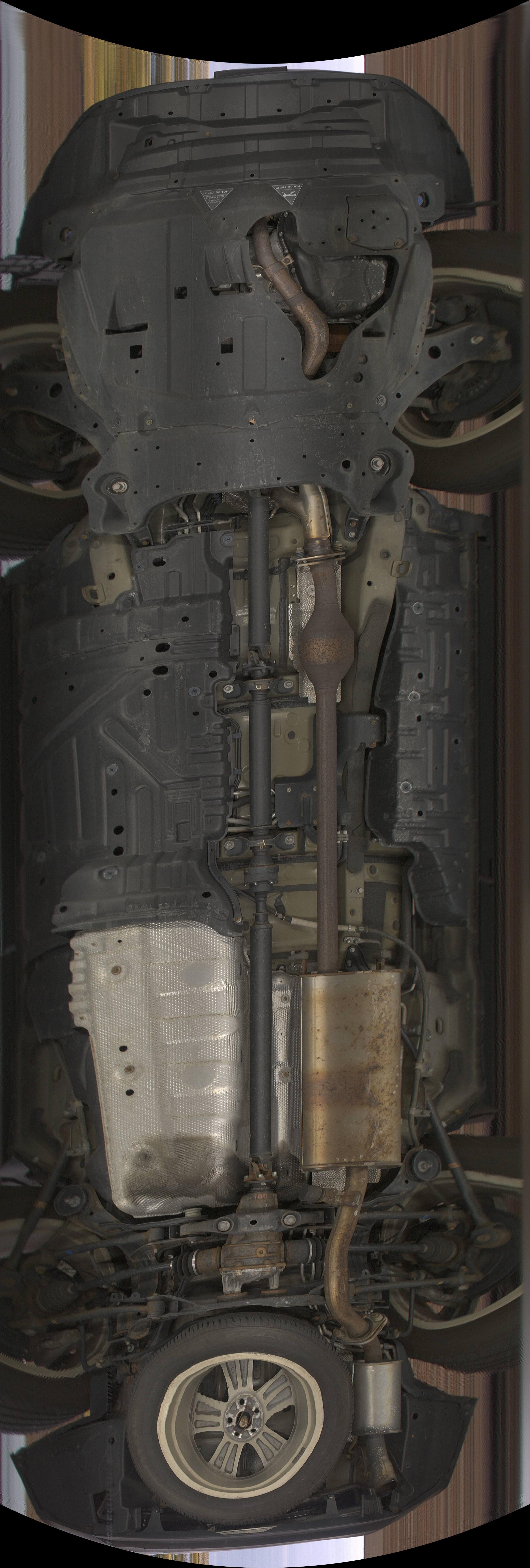
Full resolution stitched image of a vehicle's undercarriage captured by C-IVISS.

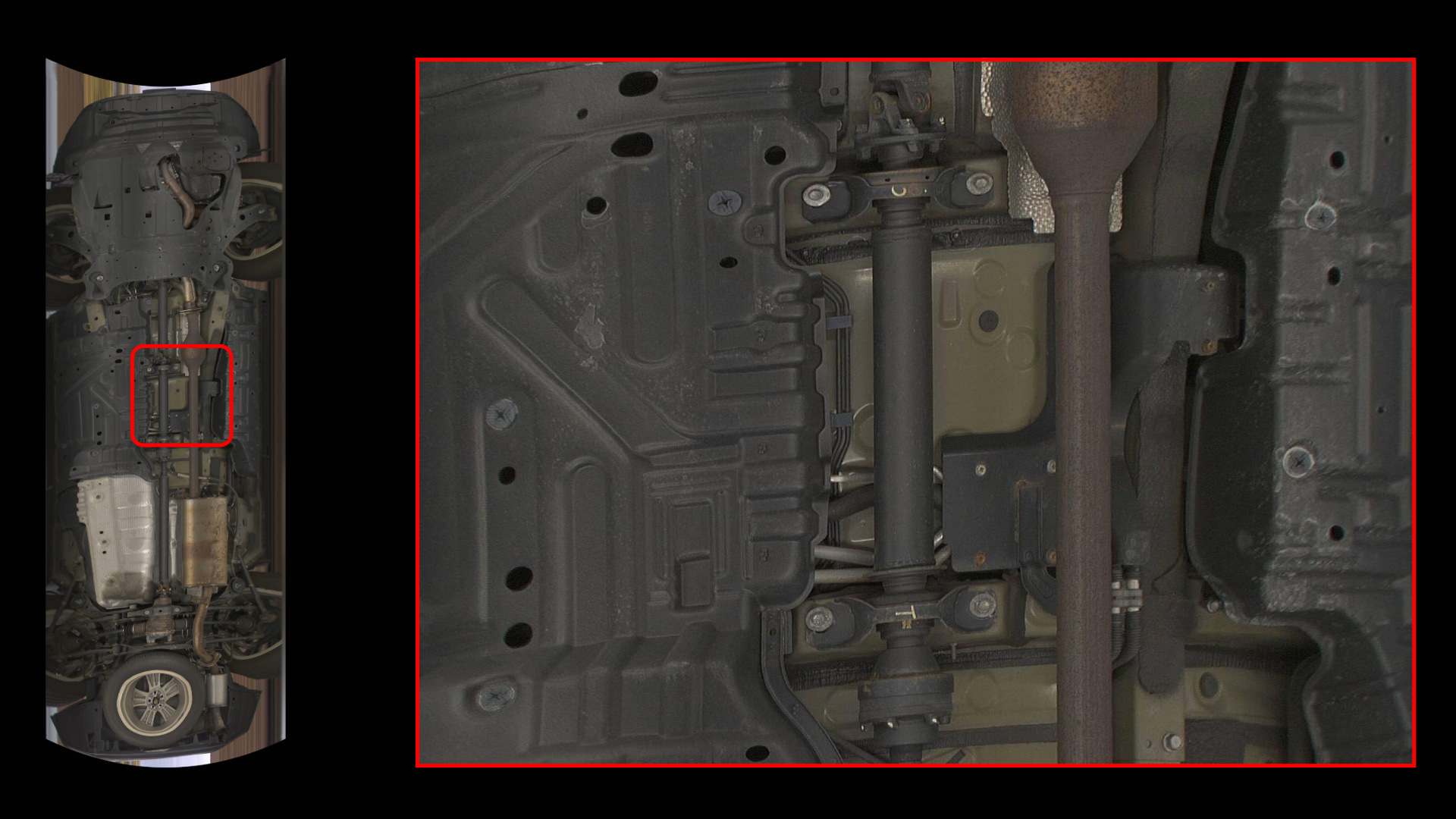
Full resolution stitched image of a vehicle's undercarriage captured by C-IVISS.
Full resolution stitched image of a vehicle's undercarriage captured by C-IVISS.